3d inverse kinematics opengl
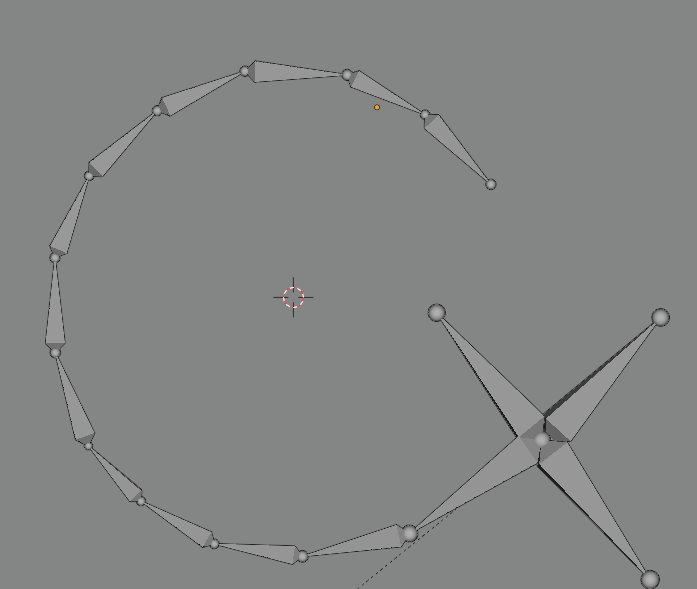
C OpenGL application implementing Inverse Kinematics on a linkage of 3 joints and 9 degrees of freedom using Jacobian Transpose method - 3D-Inverse-Kinematics. Inverse kinematics refers to the use of the kinematics equations of a robot to determine the joint parameters that provide a desired position of the end-effector.
3d Mesh Processing And Character Animation Springerlink
Modelagem 3D Animação 3D Projects for 10 - 30.
. This paper presents a novel Target Triangle algorithm that can fast. I need someone who can do Inverse Kinematics Animations. Inverse kinematics transforms the motion.
The cyclic coordinate descent CCD is a well-known algorithm used for inverse kinematics solutions in multi-joint chains. Advantages can also be pointed out. You need to represent the orientation of your end effector as a 3 by 3 rotation matrix.
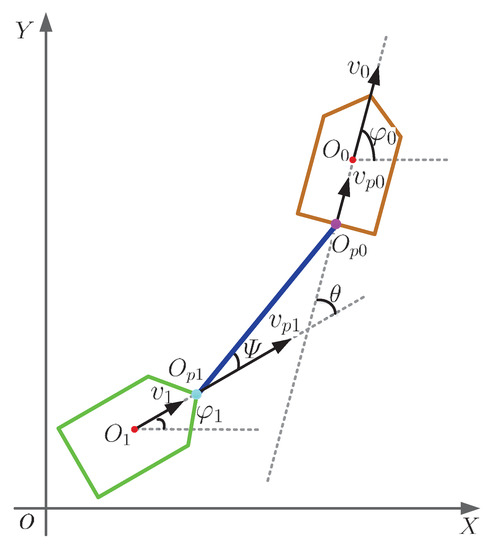
In this book we shall use rotation matrices which have many desirable propertiesAs a consequence the positionsorientations. Does anybody know of a good method of doing inverse kinematics in a game i would like it to be fast enough for a game and it doesnt have to be very precise just basic humanoid character animation. Publicar um Projeto.
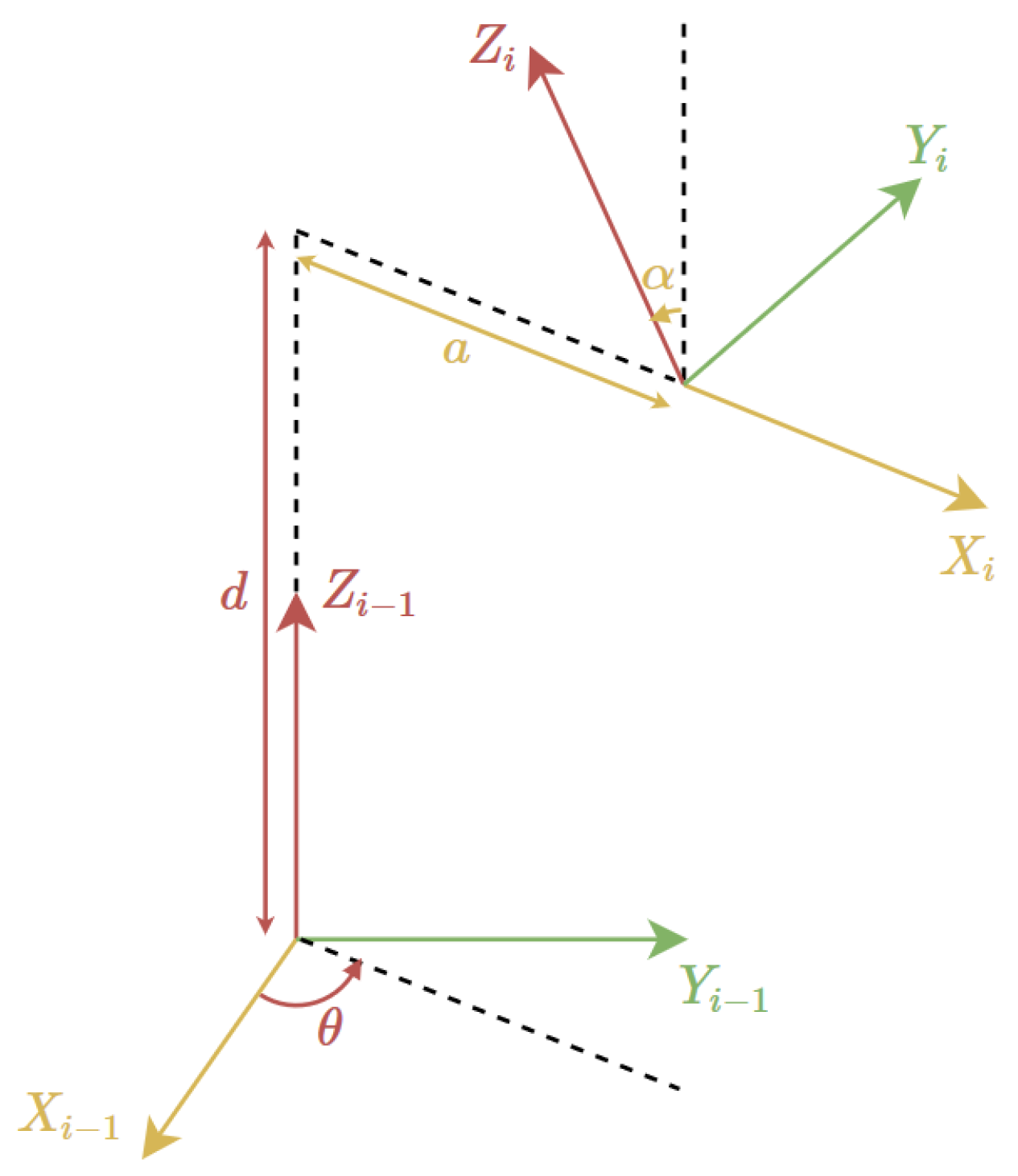
Forward kinematics for 3D end-effectors Transformation matrices. Specification of the movement of a robot so that its end-effector achieves a desired task is known as motion planning. By following a mathematical approach to defining 3D algorithms it is possible to predict and plan the design of a 3D animation system.
You the calculate the orientation of the end effector at the current joint vector Theta and then by adding a small increment to each element in the joint vector 6 increments in your case since six joints. Fast inverse kinematics. I need someone who can do Inverse Kinematics Animations.
Afim de ganhar algum dinheiro. Spiral_Man April 5 2001 144pm 1. 2 comentários Rawalpindi Pakistan ID do Projeto.
The Top 4 3d Graphics Inverse Kinematics Open Source Projects. C OpenGL application implementing Inverse Kinematics on a linkage of 3 joints and 9 degrees of freedom using Jacobian. 2 reviews Rawalpindi Pakistan Project ID.
3D Animation 3D Modelling Animation Computer Graphics OpenGL. Tutorials are fine but i would like to implement it on my own some some basic. Euler angles quaternions or rotation matrices.
Such mathematical approaches allow for the implementation of character animation spline curves and inverse kinematics. Browse The Most Popular 4 3d Graphics Inverse Kinematics Open Source Projects. CCD algorithm can be easily implemented but it can take a series of iterations before converging to a solution and also generate improper joint rotations.
Gráficos de Computador OpenGL. There are many ways to represent the orientations of rigid bodies. In the simple case where you were interested.
Usually the end-effector is a rigid 3D object rigid body.
Mathematics Free Full Text Precise Trajectory Tracking Control Of Ship Towing Systems Via A Dynamical Tracking Target Html
Robotic Arm Simulations Probably The Greatest Limitation For Me By Tim Chinenov Medium

3d Visualization Of The Kinematic Model Of The Robotic Finger In Opengl Download Scientific Diagram
Inverse Kinematics In 3d Alan Zucconi

Tkinter Cognitive Dissonance

Character Animation Skeletons And Inverse Kinematics Venturebeat
3d Rigging Of Logos For Character Animation Practical Steps Cademix Institute Of Technology

Pdf Four Degrees Of Freedom Scara Robot Kinematics Modeling And Simulation Analysis Semantic Scholar
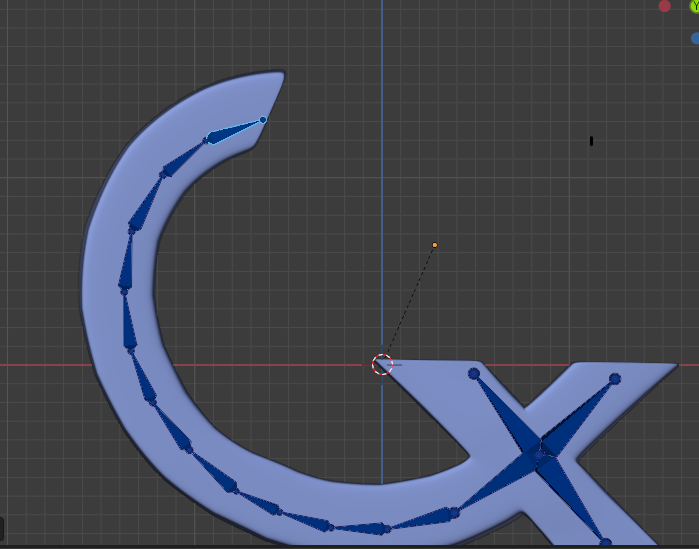
3d Rigging Of Logos For Character Animation Practical Steps Cademix Institute Of Technology
Inverse Kinematics In 3d Alan Zucconi

Inverse Kinematics In 3d Alan Zucconi
Inverse Kinematics In 3d Alan Zucconi

Anim8or 3d Modeler Steemhunt
Applied Sciences Free Full Text State Estimation Of Over Sensored Systems Applied To A Low Cost Robotic Manipulator Html

Inverse Kinematics Hands Procedurally Generated Weapon Animations And More Projects I Made Coding Facepunch Forum
Unity Manual Decals And Projectors
3d Rotations And Euler Angles In Python Meccanismo Complesso

Inverse Kinematics For Robotic Arms Alan Zucconi

Hands On C Game Animation Programming Learn Modern Animation Techniques From Theory To Implementation With C And Opengl Paperback